浅谈RTK技术在小水利工程中的应用
更新时间:2017-05-17 14:14:31 来源: 作者: 浏览:378次 评论:0条
导读:浅谈RTK技术在小水利工程中的应用 摘要:随着科技的不断进步,全球卫星定位系统GPS在测量领域不断得到发展,特别是近几年RTK性能的不短完善,RTK更是得到大家的亲赖。它操作简单,精度高,也让大家确实减少了不少工作量,提高了效益。RTK技术进行控制测量改变了传..
浅谈RTK技术在小水利工程中的应用
摘要:随着科技的不断进步,全球卫星定位系统GPS在测量领域不断得到发展,特别是近几年RTK性能的不短完善,RTK更是得到大家的亲赖。它操作简单,精度高,也让大家确实减少了不少工作量,提高了效益。RTK技术进行控制测量改变了传统的从高级到低级的作业方式,可以直接在首级控制点下直接步设图根点,误差无积累。
关键词:GPS;RTK;精度;水利工程;
一认识几个基本概念
我们知道,GPS的定位原理就是利用空间分布的卫星(21颗工作卫星+3颗备用卫星)以及卫星与地面点的距离交会得出地面点的位置,亦即空间的距离交会原理。其定位方法按照参考点的位置不同可分为绝对定位和相对定位。
GPS绝对定位又叫单点定位,即以GPS卫星和用户接收机天线在WGS-84坐标系中相对于坐标原点(地球质心)的绝对位置。根据用户接收机天线所处的状态不同,分为静态绝对定位和动态绝对定位。静态绝对定位的精度为米级,主要用于大地测量;而动态绝对定位的精度为10~40m,只能用于一般性的导航定位中。
GPS相对定位是用两台GPS分别安置在基线的两端,同步观测相同的卫星,通过两测站同步采集GPS数据,经过数据处理以确定基线两端点的相对位置(或基线向量)。根据定位过程中接收机天线所处的状态不同,GPS相对定位分为静态相对定位和动态相对定位。静态相对定位也就是我们常说的GPS静态测量,它是通过接收机长时间连续观测获得充分的多余观测数据,解算基线向量,求得控制点的坐标值。(解算过程很复杂,一般用软件才能进行。这里就不写了。)动态相对定位也称为差分GPS定位,按照提供修正数据的基准站的数量不同,可分为单基准站差分和多基准站差分,单基准站差分根据基准站所发送的修正数据的类型不同又分为位置差分、伪距差分、载波相位差分。载波相位差分又称RTK技术,通过对两测站的载波相位观测值进行实时处理,可以实时提供厘米级精度的三维坐标。(处理过程很复杂,一般用机内软件自动进行。这里就不写了。)
二对RTK技术的认识
载波相位差分的基本原理是:由基准站通过数据链实时地将其载波相位观测量及基准站坐标信息一同发送到用户站(移动站),并与用户站(移动站)的载波相位观测量进行差分处理,实时地给出用户站(移动站)的精确坐标。
与RTK定位有关的误差:
①与无线数据链有关的误差
由于实施动态差分GPS定位技术的便携电台多为直接传输超高频(UHF)电台,在传输信道内部噪声及其造成的符号间干扰,不可避免地会产生错差,使得RTK流动接收机接收误码的信息,影响RTK定位结果的正确性。这类误差可归纳为:1)差分信息调制误差;2)差分信息调解误差;3)外界环境干扰影响。以上因素可通过选择或调整调制解调器相关参数,将误码率控制在最小范围之内,甚至可将误差控制在10-9数量级。
②与流动站及其观测作业有关的误差
RTK动态作业时载体瞬时姿态改正精度是一项重要的误差来源。进行动态观测作业时,在待定点P上无法实时确定天线动态瞬时姿态,
如图所示,地面坡度或天线对中杆倾斜姿态角使P点铅垂方向A偏移B,即引起平面和高程误差,如果姿态改正分别为△P和△h,很小时,可按下图例出两项误差改正模型:
△P=h0•sin
△h=h1+h2=h0(sec-1)+h2
式中△P---姿态角即坡度引起的平面误差;
△h---姿态角即坡度引起的高程误差.
当取h0≤2m、≤5°时,姿态角引起的平面误差△P如下表:
从表中可以看出,姿态角引起的平面误差△P随姿态角和天线高度的增大而迅速增加。实际RTK作业时,应尽量在待定点上以静态或准动态方式置平对中和确定控制天线高度在1.5m以下。那么这项误差可望控制在±1cm左右。
一般来自地面本身的不规则起伏应在3cm以内,当取h0≤2m、≤5°、h2=0.030m时,姿态角引起的高程误差△h如下表:
从表中可以看出,姿态角引起的高程误差△h主要受来自地表本身的不规则起伏变化影响。实际RTK作业时,应尽量在待定点上以静态或准动态方式置平对中和确定控制天线高度在1.5m以下。那么这项误差可望控制在1cm左右。
三实际应用例子
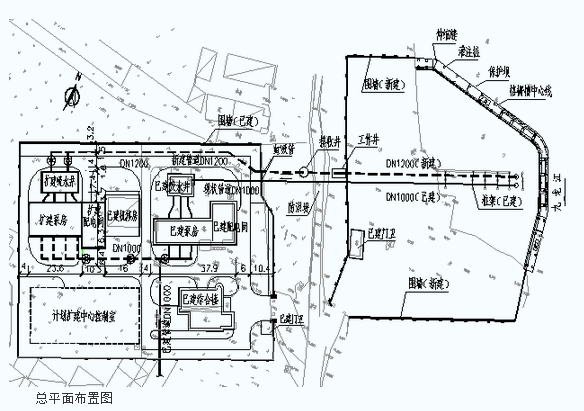
2007年12月,我单位承接湖南省新晃县杉木塘水电站的勘测和设计。该工程是一个引水式发电工程,有大坝、厂房及1.7公里长的遂道开挖,地理位置属于起伏较大的山岭地区,大坝与厂房之间有好几座大山。如果采用老式三角测量的方法建立控制网,那工作量就相当的大。可当时时间很紧迫,考虑到RTK的精度为:平面精度1cm+Dppm,垂直精度2cm+Dppm,完全满足我们水利水电工程测量规范精度。于是我们决定用RTK做控制,先把大坝、遂道进出口、厂房段的地形图以及水库库区内的淹没调查等工作做完。以后再做GPS静态控制测量。我们按照E等GPS网标准在枢纽部分共布设了5个(编号分别为:SC1、SC2、SC3、SJ0、SJ3)控制点(具体见控制点平面布置图)。
先用水准仪按照四等水准要求,分别在隧道进出口附近各埋设了一个水准点,作为施工放样高程原点并测得SC1点的水准高程为306.213米。然后我们以SC1(3029.26,36623.96,306.213)点为基点,用悬挂罗盘定方位角建立了一个独立直角坐标系统。用2″级索佳全站仪实测得SC2的坐标为(3462.221,37265.857,318.224)。有了起始基线SC1—SC2,我们用中海达HD-5800G进行RTK测量。求得转换参数后,用对点器对中采集各控制点,其成果如下表
以此成果,我们完成了所有的外业工作。
考虑到隧道的开挖,并且业主要求提供测量成果报告书,于是我们于工程开工前做了GPS静态测量。用3台静态GPS,按照如下三角形图形进行观测:SC1-SC2-SC3;SC1-SC2-SJ0;SC1-SC2-SJ3;SC2-SJ0-SJ3;SC3-SJ0-SJ3。每测站观测时间不少于50分钟。通过HDS2003数据处理软件处理,最后平差结果如下:
最终坐标平差值
最弱点平面中误差
从最终坐标平差值成果来看,RTK测量的成果与GPS静态测量的成果基本相同。通过比较,SC3点偏差0.012m、SJ0点偏差0.011m、SJ3点偏差0.015m。
假设SC3点上的中误差是垒加的,那么基线最弱边(SC1-SC3)相对中误差=(0.0061+0.012)/262.353=1/14494。也能满足规范的要求。后来我们给施工方提交了静态测量成果。经过将近一年的施工,隧道在中间顺利贯通。
四结束语
通过多年的实际操作与运用,本文笔者得出结论:①RTK技术测量在小水利工程中不仅能做碎部点测量、施工放样、库区高程测量,而且能做控制测量。②但是在做控制测量时,一定要用对点器对中整平并且要选择好的时段,力求在固定解的误差最小时采集数据。
参考文献
[1]《GPS测量技术》黄河水利出版社周立主编
[2]《水利水电工程测量规范》SL197-97
[3]张孝军,林云发.GPSRTK技术的测量精度探讨[J].人民长江,
免责声明:《浅谈RTK技术在小水利工程中的应用》一文仅代表作者个人观点,与水利在线无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。凡注明为其他媒体来源的信息,均为转载自其他媒体,转载的目的只是为了传播更多的信息,并不代表本网赞同其观点,也不代表本网对其真实性负责。您若对该稿件内容有任何疑问或质疑,请即与水利在线联系(QQ:593295900),本网将迅速给您回应并做处理。如果您觉得本文不错,可以点击下面的打赏按钮,对本站进行打赏支持!
| 相关新闻









| 评论
| 评论 |
|
|